
Der TeaBoy hebt nach Ablauf der eingestellten Zeit den Teebeutel aus der Tasse.
Bedienung:
- Teebeutel am Arm einhängen und über der Tasse mit heißem Wasser positionieren
- Timer minutengenau einstellen
- Der Arm mit dem Teebeutel senkt sich in den Tee
- Nach Ablauf der Zeit hebt sich der Arm automatisch und eine Melodie informiert, dass der Tee fertig ist

Schaltplan

Bauteile
| Bauteile | Menge | Preis | Lieferant | Summe |
|---|---|---|---|---|
| Coffee Pads Dose | 1 | 1,29 | Mömax | 1,29 |
| Modelcraft Standard-Servo RS 2 | 1 | 5,95 | Conrad | 5,95 |
| Batterie 9V | 1 | 1,30 | Reichelt | 1,30 |
| Batterieclip | 1 | 0,13 | Reichelt | 0,13 |
| Taster, Printmontage, Kappe blau | 4 | 0,81 | Reichelt | 3,24 |
| 7-Segment Anzeige blau | 2 | 1,18 | Reichelt | 2,36 |
| 74HC595 | 2 | 0,32 | Reichelt | 0,64 |
| Arduino UNO (Atmel ATmega328) | 1 | 4,50 | Watterott | 4,50 |
| Piezo Schallwandler | 1 | 0,63 | Reichelt | 0,63 |
| Standardquarz 16 MHz | 1 | 0,15 | Reichelt | 0,15 |
| Spannungsregler 7805 | 1 | 0,24 | Reichelt | 0,24 |
| Kondensator 100µF | 2 | 0,04 | Reichelt | 0,08 |
| Kondensator 22pF | 2 | 0,05 | Reichelt | 0,10 |
| Kondensator 100nF | 2 | 0,05 | Reichelt | 0,10 |
| Transistor PNP MPSA64 | 1 | 0,06 | Reichelt | 0,06 |
| Transistor NPN BC547C | 1 | 0,06 | Reichelt | 0,06 |
| Widerstand 10 KΩ | 3 | 0,03 | Reichelt | 0,09 |
| Widerstand 10 Ω | 1 | 0,03 | Reichelt | 0,03 |
| Widerstand 4,7 KΩ | 1 | 0,03 | Reichelt | 0,03 |
| Widerstand 1 KΩ | 1 | 0,03 | Reichelt | 0,03 |
| Widerstand 75 Ω | 15 | 0,03 | Reichelt | 0,45 |
| IC-Sockel 28-Pin | 1 | 0,35 | Reichelt | 0,35 |
| Stiftleiste | 1 | 0,10 | Reichelt | 0,10 |
| Buchsenleiste 10-Pin | 2 | 0,24 | Reichelt | 0,48 |
| Streifenraterplatine 50x100 | 2 | 0,49 | Reichelt | 0,98 |
| Lochrasterplatine 50x100 | 1 | 0,37 | Reichelt | 0,37 |
| Pfostenbuchse 10-polig | 2 | 0,08 | Reichelt | 0,16 |
| Wannen-Steckerleiste 10-polig | 2 | 0,41 | Reichelt | 0,82 |
| 24,22 |
Platinen
Streifenrasterplatine
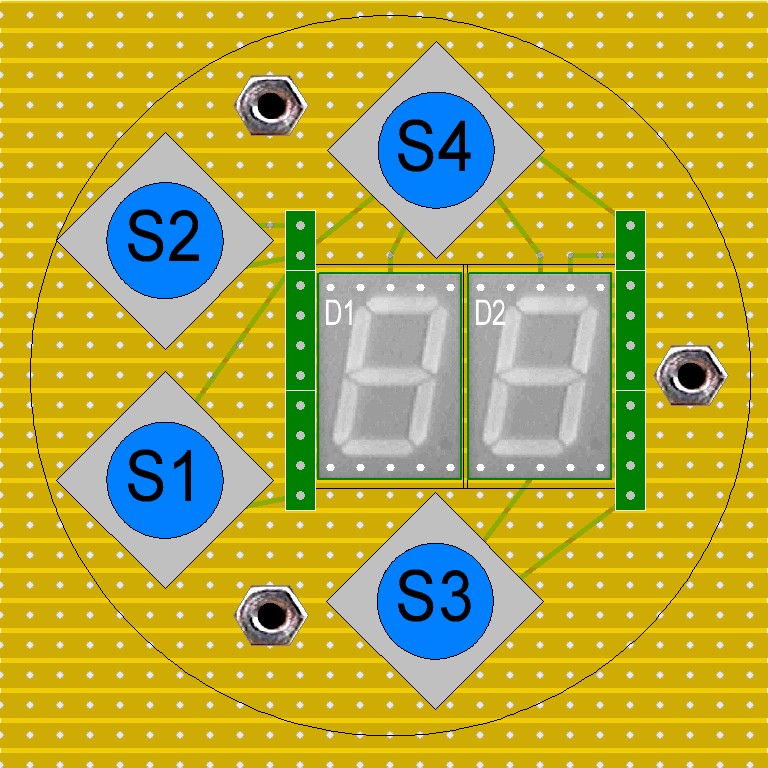











Leiterplatten












Bilder







Prototyp





Sourcecode
include <Servo.h>
include <Bounce.h>
include <MsTimer2.h>
Servo myservo; // Servo Object
const int buttonUp = 10; // Button Up const int buttonDown = 8; // Button Down const int buttonStart = 3; // Button Start Timer const int speakerOut = 4; // Speaker const int latchPin = 6; // Pin connected to ST_CP of 74HC595 const int clockPin = 7; // Pin connected to SH_CP of 74HC595 const int dataPin = 5; // Pin connected to DS of 74HC595 const int powerPin = 2; // Power Pin const int servo = 9; // Servo
// Servo degrees
define WINKELOBEN 45
define WINKELUNTEN 70
define WINKELPARK 175
// Config Sound
define c1 3830
define d1 3400
define e1 3038
define f1 2864
define g1 2550
define a1 2272
define b1 2028
define C1 1912
define R1 0
int melody[] = { C1, c1, g1, a1, C1, C1, b1, g1, C1, b1, e1, R1}; int beats[] = { 16, 16, 16, 8, 8, 16, 16, 16, 8, 8, 16, 32};
// Config Buttons Bounce bouncerUp = Bounce(buttonUp, 10); Bounce bouncerDown = Bounce(buttonDown, 10); Bounce bouncerStart = Bounce(buttonStart, 10); int buttonUpvalue = HIGH; int buttonDownvalue = HIGH; int buttonStartvalue = HIGH;
int MAX_COUNT = sizeof(melody) / 2; // Melody length, for looping. long tempo = 10000; // Set overall tempo int pause = 1000; // Set length of pause between notes // Loop variable to increase Rest length int rest_count = 100; //<-BLETCHEROUS HACK // Initialize core variables int tone_ = 0; int beat = 0; long duration = 0;
// right display const byte LED_CHAR_SET1[12] = {
B11111010, B01100000, B11011100,
B11110100, B01100110, B10110110,
B10111110, B11100000, B11111110,
B11110110, B00000001, B00000000
};
// left display const byte LED_CHAR_SET2[12] = {
B11111010, B01100000, B11011100,
B11110100, B01100110, B10110110,
B10111110, B11100000, B11111110,
B11110110, B00000001, B00000000
};
// Init variables
define TIMER2 1000 // Timer event every second (1000ms)
boolean blinkingDot = true; unsigned long seconds = 0; boolean timeOver = false; boolean timerStart = false; int timeCounter = 0; int shutDown = 0; unsigned long idleTime = 0;
void setup() {
pinMode(powerPin, OUTPUT);
digitalWrite(powerPin, HIGH);
moveServo(WINKELOBEN);
myservo.attach(servo); // attaches the servo to the servo object
//set pins to output because they are addressed in the main loop
pinMode(latchPin, OUTPUT);
pinMode(clockPin, OUTPUT);
pinMode(dataPin, OUTPUT);
pinMode(speakerOut, OUTPUT);
// buttons to input
pinMode(buttonUp, INPUT);
pinMode(buttonDown, INPUT);
pinMode(buttonStart, INPUT);
// Enable internal pullup resistors
digitalWrite(buttonUp, HIGH);
digitalWrite(buttonDown, HIGH);
digitalWrite(buttonStart, HIGH);
display(0, 0);
MsTimer2::set(TIMER2, checkTimer);
MsTimer2::start();
delay(500);
}
void loop() {
bouncerUp.update();
bouncerDown.update();
bouncerStart.update();
if (bouncerUp.read() == LOW) {
if (buttonUpvalue == HIGH) {
if (!timerStart) {
timeCounter++;
if (timeCounter > 99)
timeCounter = 0;
display(timeCounter/10, timeCounter%10);
idleTime = 0;
}
}
}
buttonUpvalue = bouncerUp.read();
if (bouncerDown.read() == LOW) {
if (buttonDownvalue == HIGH) {
if (!timerStart) {
timeCounter--;
if (timeCounter < 0)
timeCounter = 0;
display(timeCounter/10, timeCounter%10);
idleTime = 0;
}
}
}
buttonDownvalue = bouncerDown.read();
if (bouncerStart.read() == LOW) {
if (buttonStartvalue == HIGH) {
if ((timeCounter > 0) && !timerStart) {
timerStart = true;
moveServo(WINKELUNTEN);
}
else if ((timeCounter > 0) && timerStart) {
timerStart = false;
timeOver = false;
timeCounter = 0;
idleTime = 0;
display(0, 0);
moveServo(WINKELOBEN);
}
else if (timeCounter == 0) {
moveServo(WINKELPARK);
delay(500);
digitalWrite(powerPin, LOW);
}
idleTime = 0;
}
}
buttonStartvalue = bouncerStart.read();
if (timeOver) {
moveServo(WINKELOBEN);
playMelodie();
shutDown++;
}
if (shutDown >= 3) {
timeOver = false;
digitalWrite(powerPin, LOW);
}
}
void checkTimer() {
if (timerStart) {
if (blinkingDot) {
display(11, 10);
blinkingDot = false;
}
else {
display(10, 11);
blinkingDot = true;
}
seconds++;
if (seconds >= timeCounter * 60)
timeOver = true;
}
idleTime++;
if ((idleTime >= 60) && !timerStart) {
digitalWrite(powerPin, LOW);
}
}
void moveServo(int degree) {
int curPos = myservo.read();
if (curPos >= degree) {
for (int i=curPos; i>=degree; i--) {
myservo.write(i);
delay(15);
}
} else {
for (int i=curPos; i<degree; i++) {
myservo.write(i);
delay(15);
}
}
}
void playMelodie() {
for (int i=0; i<MAX_COUNT; i++) {
tone_ = melody[i];
beat = beats[i];
duration = beat * tempo; // Set up timing
playTone();
// A pause between notes...
delayMicroseconds(pause);
}
}
void display(byte seg1, byte seg2){
send(seg2, seg1);
}
void send(byte data1, byte data2){
//ground latchPin and hold low for as long as you are transmitting
digitalWrite(latchPin, LOW);
shiftOut(dataPin, clockPin, LSBFIRST, LED_CHAR_SET2[data2]);
shiftOut(dataPin, clockPin, LSBFIRST, LED_CHAR_SET1[data1]);
//return the latch pin high to signal chip that it no longer needs to listen for information
digitalWrite(latchPin, HIGH);
}
void playTone() {
long elapsed_time = 0;
if (tone_ > 0) { // if this isn't a Rest beat, while the tone has
// played less long than 'duration', pulse speaker HIGH and LOW
while (elapsed_time < duration) {
digitalWrite(speakerOut,HIGH);
delayMicroseconds(tone_ / 2);
// DOWN
digitalWrite(speakerOut, LOW);
delayMicroseconds(tone_ / 2);
// Keep track of how long we pulsed
elapsed_time += (tone_);
}
}
else { // Rest beat; loop times delay
for (int j = 0; j < rest_count; j++) { // See NOTE on rest_count
delayMicroseconds(duration);
}
}
}Bedienungsanleitung
Bedienungsanleitung TeaBoy
Video